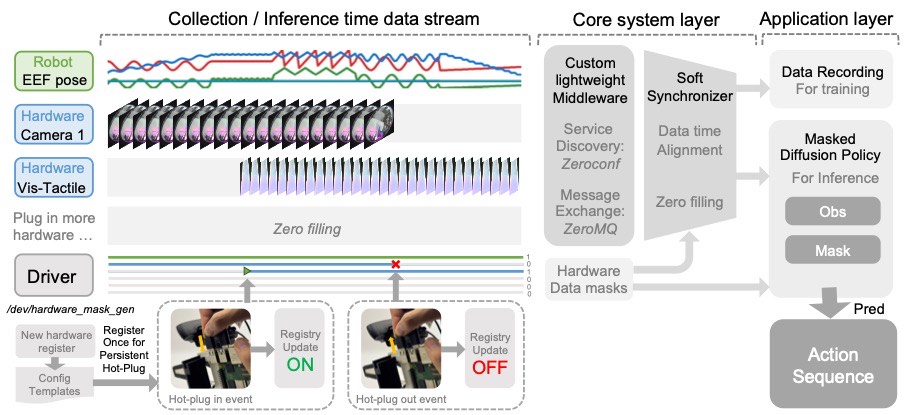
The driver-level Physical Mask abstraction derives modality presence from USB hot-plug events. This enables auto-configuration and graceful degradation: policies can continue executing even when sensors are physically added or removed at runtime.
Assembly Guide
RAPID's modular design enables tool-free assembly in seconds. See the detailed step-by-step instructions here.